| Registrazione | Entro il 15 20 agosto 2014 |
Entro il 31 agosto 2014 |
Dal 1 settembre |
|---|---|---|---|
| Docenti e ricercatori | 260 € | 300 € | 350 € |
| Studenti | 130 € | 180 € | 250 € |
| Cena sociale extra | 75 € |
Sara' possibile iscriversi sul posto.
La registrazione comprende:
| Autori e Titolo |
|---|
| Enrico Canuto and Luigi Colangelo. Angular drag-free control and fine satellite-to-satellite pointing for the Next Generation Gravity Missions |
| Pasquale Palumbo, Andrea De Gaetano, Claudio Gaz and Simona Panunzi. An islet population model of the endocrine pancreas |
| Andrea Calanca and Paolo Fiorini. Human-adaptive control of series elastic actuators |
| M. Robba, R. Minciardi and F. Delfino. Optimal planning and control of distributed power and energy systems: University of Genova test-bed facilities, research activity and challenges |
| Maria Pia Fanti, Agostino Marcello Mangini, Michele Roccotelli and Walter Ukovich. A Control System for District Energy Management |
| Massimo Satler, Matteo Unetti, Nicola Giordani, Carlo Alberto Avizzano and Paolo Tripicchio. Towards an autonomous flying robot for inspections in open and constrained spaces |
| Michele Ermidoro, Simone Formentin, Alberto Cologni, Fabio Previdi and Sergio Savaresi. On time-optimal antisway controller design for bridge cranes |
| Claudio Carnevale, Giovanna Finzi, Anna Pederzoli, Enrico Turrini, Marialuisa Volta, Giorgio Guariso, Giuseppe Maffeis and Roberta Gianfreda. The Regional Integrated Assessment Tool (RIAT+) |
| Enrico Simetti, Sandro Torelli, Giuseppe Casalino and Alessio Turetta. Experimental Results on Obstacle Avoidance for High Speed Unmanned Surface Vehicles |
| Alice Guerini and Giuseppe De Nicolao. Long-term electric load forecasting: a torus-based approach |
| Mirko Ferrati and Lucia Pallottino. Poster Session Proposal: A time expanded network based algorithm for safe and efficient distributed multi-agent coordination |
| Alessandro Settimi and Lucia Pallottino. Subgradient Based Task Assignment and Optimal Control for Heterogeneous Mobile Robots |
| Andrea Caiti, Francesco Di Corato, Davide Fenucci, Simone Grechi, Manuel Novi, Francesco Pacini and Giacomo Paoli. V-FIDES: A NEW GENERATION AUV FOR DEEP UNDERWATER EXPLORATION |
| Luca Consolini, Alessandro Costalunga, Aurelio Piazzi and Marco Vezzosi. Minimum-time feedforward control of an open liquid container |
| Mariagrazia Dotoli, Nicola Epicoco, Marco Falagario, Carla Seatzu and Biagio Turchiano. A Decision Support System for Optimizing Intermodal Inland Rail-Road Freight Transport Terminals |
| E. De Santis, M.D. Di Benedetto, D. Pezzuti and G. Pola. Safety Criticality Analysis of Multi-Agent Air Traffic Management Systems: A Compositional Hybrid Systems’ Approach |
| Silvio Simani, Saverio Farsoni, Paolo Castaldi and Marcello Bonfè. Fault Diagnosis of Offshore Wind Turbines via Identified Fuzzy Residual Generators |
| Carlos Norberto Perez Montenegro, Mauricio Lotufo, Luigi Colangelo and Enrico Canuto. Piloting and guidance algorithms for autonomous landing |
| Orario | Autori e Titolo |
|---|---|
| 14.00 | Arash Ajoudani, Antonio Bicchi and Nikos Tsagarakis. Transferring Human Impedance Regulation Skills to Robots |
| 14.15 | Domenico Colacino, Alessio Merola, Carlo Cosentino and Francesco Amato. Modelling and Identification of Hysteresis in a Pneumatic Muscle Actuator |
| 14.30 | Manolo Garabini and Antonio Bicchi. Soft Robotics: from Optimality Principles to Technology Readiness |
| 14.45 | Nicola Maria Ceriani, Andrea Maria Zanchettin and Paolo Rocco. Task-constrained Collision Avoidance for Dual Arm Robots using Quadratic Programming |
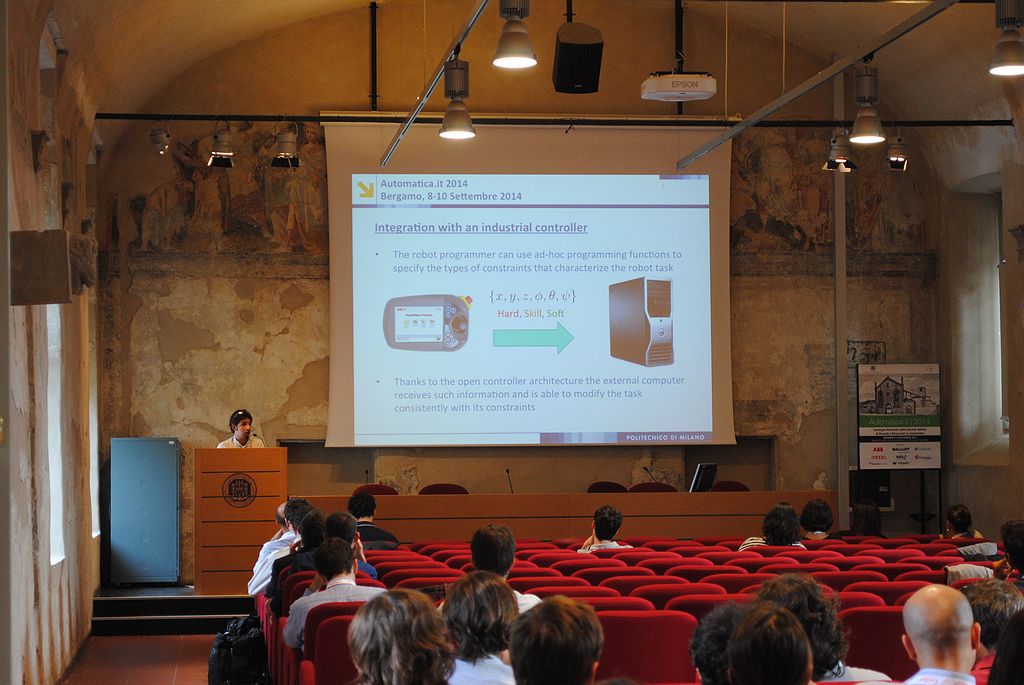
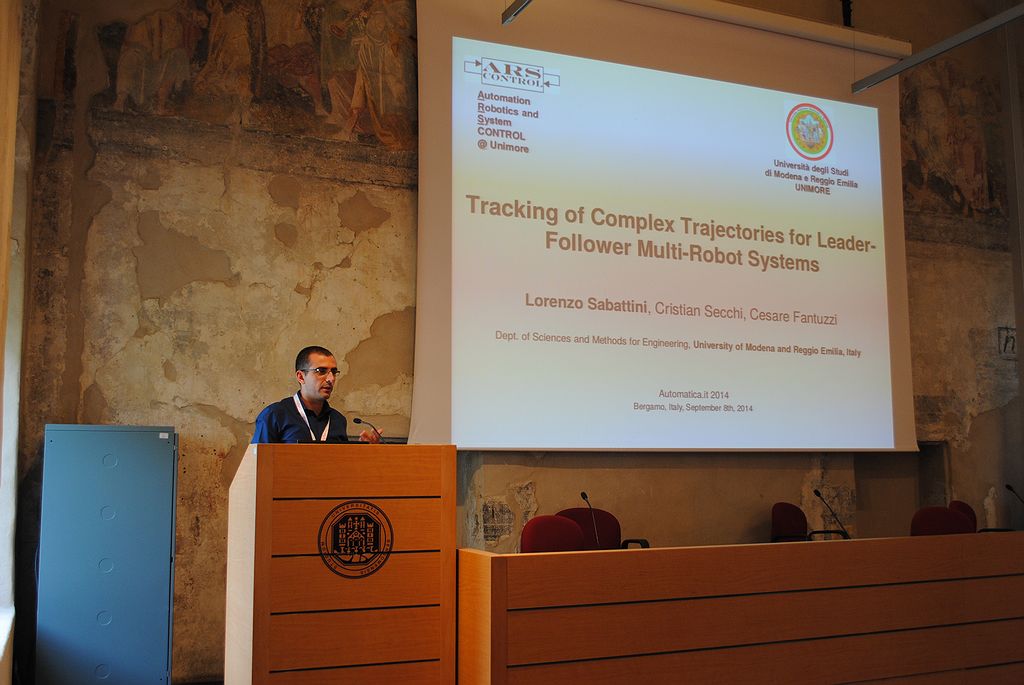
| 15.00 | Lorenzo Sabattini, Cristian Secchi and Cesare Fantuzzi. Tracking of Complex Trajectories for Leader-Follower Multi-Robot Systems |
| 15.15 | Gianluca Palli, Le Pan and Claudio Melchiorri. Variable Stiffness Joints Based on the Twisted String Actuators: Modeling and Control |
| 15.30 | Fanny Ficuciello, Luigi Villani and Bruno Siciliano. The role of Redundancy Resolution in Human-Robot Co-Manipulation |
| 15.45 | C. Gaz, E. Magrini, F. Flacco and A. De Luca. Dynamic Model Identification of a 7-DoF Robot by Reverse Engineering and its Exploitation for Control and Physical Human-Robot Interaction |
| Orario | Autori e Titolo |
|---|---|
| 16.30 | Walter Lucia, Giuseppe Franzè and Domenico Famularo. A receding horizon control strategy for autonomous vehicles in dynamic environments |
| 16.45 | G. Gioioso, G. Salvietti, A. Franchi, M. Malvezzi, S. Scheggi, L. Meli, M. Ryll, H.H. Bulthoff and D. Prattichizzo. The Flying Hand: a Teleoperation Famework for Coop. Aerial Grasping and Transportation |
| 17.00 | Roberto Naldi, Michele Furci, Ricardo Sanfelice and Lorenzo Marconi. Global Trajectory Tracking for Underactuated VTOL Aerial Vehicles using Cascade Control Paradigms |
| 17.15 | Paolo Castaldi, Nicola Mimmo, Roberto Naldi and Lorenzo Marconi. Robust Trajectory Tracking for Underactuated VTOL Aerial Vehicles: Extended for Adaptive Disturbance Compensation |
| 17.30 | Maria Pia Fanti, Agostino Marcello Mangini, Giovanni Pedroncelli and Walter Ukovich. Decentralized Deadlock-Free Control for AGV Systems |
| 17.45 | Stefano Riverso, Fabio Sarzo and Giancarlo Ferrari-Trecate. Voltage and frequency control of islanded microgrids: a plug-and-play approach |
| 18.00 | Valerio Mariani, Francesco Vasca and Josep Guerrero. Model Order Reductions for Stability Analysis of Islanded Microgrids with Droop Control |
| 18.15 | Maria Pia Fanti, Agostino Marcello Mangini, Giovanni Pedroncelli and Walter Ukovich. Electric Vehicles: Some Approaches for Charging Stations Assignment and Fleet Sizing |
| Orario | Autori e Titolo |
|---|---|
| 9.00 | Dario Piga. Computation of the Structured Singular Value via a theory-of-moment based relaxation |
| 9.15 | Fabrizio Padula and Antonio Visioli. Controllo Robusto per Sistemi Frazionari |
| 9.30 | Francesco Forte and Lorenzo Marconi. Robust Nonlinear Regulation: Continuous Internal Models and Hybrid Identifiers |
| 9.45 | Francesco Amato, Carlo Cosentino, Gianmaria De Tommasi and Alfredo Pironti. Solution of the mixed H-infinity/FTS Control Problem |
| 10.00 | Francesco Amato, Domenico Colacino, Carlo Cosentino and Alessio Merola. Control of Nonlinear Quadratic Systems: A Guaranteed Cost Approach |
| 10.15 | Daniele Carnevale, Sergio Galeani, Laura Menini and Mario Sassano. Output Regulation of Hybrid Linear Systems with Unpredictable Jumps |
| Orario | Autori e Titolo |
|---|---|
| 11.00 | Giordano Pola, Pierdomenico Pepe and Maria Domenica Di Benedetto. Symbolic models for the control design of nonlinear time-varying delay systems with complex logic specifications |
| 11.15 | Simone Formentin, Fabrizio Dabbene, Roberto Tempo, Luca Zaccarian and Sergio Savaresi. Scenario optimization with certificates and applications to anti-windup design |
| 11.30 | Fabio Della Rossa, Carlo Piccardi and Gianpiero Mastinu. Bifurcation analysis of a car and driver model |
| 11.45 | Pierdomenico Pepe. On Converse Lyapunov-Krasovskii Theorems for Nonlinear Functional Systems |
| 12.00 | Luca De Cicco, Giuseppe Cofano and Saverio Mascolo. A Hybrid Model of the Akamai Adaptive Streaming Control System |
| 12.15 | A. Casavola, G. Franze', G. Gagliardi, D. Mari and F. Tedesco. Risultati Preliminari del Progetto PON 01-01517 - “Metodologie Innovative di Sviluppo MotoPropulsori Automobilistici |
| Orario | Autori e Titolo |
|---|---|
| 14.00 | Francesco Smarra, Alessandro D'Innocenzo and Maria Domenica Di Benedetto. Fault Tolerant Control of Multi-hop Networked Control Systems |
| 14.15 | Antonella Ferrara, Alberto Nai Oleari, Simona Sacone and Silvia Siri. Freeways as Systems of Systems: A Distributed Model Predictive Control Scheme |
| 14.30 | Marcello Farina, Giulio Betti, Luca Giulioni and Riccardo Scattolini. A review on distributed predictive control: basic ideas, extensions, and applications |
| 14.45 | Mariagrazia Dotoli, Nicola Epicoco, Marco Falagario and Graziana Cavone. A Timed Petri Nets Model for Performance Evaluation of Intermodal Freight Transport Terminals |
| 15.00 | Giorgio Iacobellis, Maria Pia Fanti and Walter Ukovich. A Decision Support System for Risk Assessment of Hazmat Transportation in Highways |
| 15.15 | Pietro Delellis, Franco Garofalo, Francesco Lo Iudice and Giovanni Mancini. Decentralized coordination of a multi-agent system based on intermittent data |
| 15.30 | Antonella Ferrara, Gian Paolo Incremona and Veronica Stocchetti. Networked Sliding Mode Control with Chattering Alleviation |
| 15.45 | Carlo Cosentino, Mariaconcetta Bilotta, Alessio Merola and Francesco Amato. An Embedded Approach to the Design of Synthetic Controllers for Chemical Reaction Networks |
| Orario | Autori e Titolo |
|---|---|
| 16.30 | Davide Raimondo and Roberto Marseglia. Input design for guaranteed fault diagnosis using zonotopes |
| 16.45 | Chiara Toffanin, Mirko Messori, Federico Di Palma, Giordano Lanzola, Giuseppe De Nicolao, Claudio Cobelli and Lalo Magni. Model Predictive Control for Artificial Pancreas: from in-silico to in-vivo |
| 17.00 | C. Carnevale, G. Finzi, G. Guariso, F. Padula, E. Turrini and M. Volta. The control of population exposure to air pollution: cost assessment and dynamical policy implementation |
| 17.15 | Francesco Carravetta, Alessandro Borri and Langford B. White. Smoothing of Markov Fields on a Spherical Lattice: a Liable Setting for Earth Surface Data Processing |
| 17.30 | Riccardo Caponetto. Modeling and control of Ionic Polymeric Metal Composite towards a novel fractional order capacitor |
| 17.45 | Enrico Canuto and Luigi Colangelo. Orbit and formation control of low-Earth-orbit gravimetry drag-free satellites |
8 Settembre 2014










































CENA Sociale
Ristorante "Pianone"
Via al Pianone, 21
24129 Bergamo
E' possibile raggiungere il ristorante in auto.